對於可攜式臂裝置,請採用測頭補償的「牽引式測點」法,遵照本程式測量點:
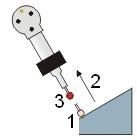
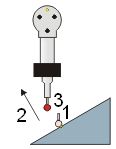
將測頭放在點位置 (1) 處的表面上。在您執行「牽引式測點」時,測桿向量無關緊要。
任意一種範例均適用於牽引式測點
按住觸測按鈕足夠長時間進行牽引觸測,但不要過長,避免PC-DMIS開始掃描工件。透過 PC-DMIS 設定編輯器修改登錄項目 DelayToStartSendingScanPointsToManualHit 可以修改區分「牽引測量點」和「開始掃描」的時間長度。請參閱修改登錄項目:介紹。
沿向量 (2) 的方向移動測尖,離開觸測位置。移動距離必須等同或者大於定義的向量距離 (3)。定義成為拉出測量點必須移開觸測點的距離,可以使用 PC-DMIS 設定編輯器修改到登錄項目 VectorToIMM。請參閱「修改登錄項目:介紹」。
放開觸測按鈕。您會聽到一個不同的較低的聲音。注意測定點已經被新增到「編輯」視窗。
在該點反白顯示的情況下,按 F9 可開啟測量點對話方塊。檢查確認向量方向係牽引方向,不是桿的方向。
對於自動特徵,由最後一個測點向量決定補償方向。對於測量特徵,則由第一個測點向量決定補償方向。
支援介面
支援牽引式測點的介面有: