在本步骤,您将进行更为准确的校准来定义臂 1 和臂 2 之间轴的坐标系。
用15毫米的测尖置换出臂1上的TP2测尖扩展名。
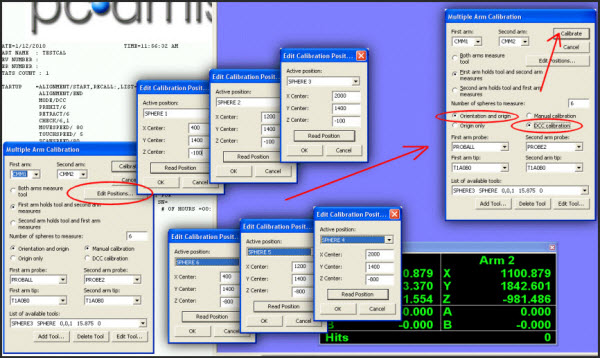
在多臂校准对话框(操作 | 校准/编辑 | 多臂模式)中,确保已设置以下项目:
关于首臂测头,选择PROBALL 测头。
关于第二臂测头,选择PROBE2 测头。
关于测量的球体个数,定义PC-DMIS测量每个机器臂的球体数量。比如,我们使用6这个值。但对于您的机器,基于机器的尺寸,可能想选择一个不同的数字。数值9可以。最大值是12。数字越大,准确性越高。但校验时间也更长,DCC校验过程中球体也更多。
计算定位平面这样臂1的球体可移动到机器Y中心线所在的平面上。这可是臂2之后可触及所有位置的球。操作如下:
手动将臂1移到多臂校验对话框中确定的六个球体位置。
点击多臂校验对话框的编辑位置,并按需修正每个球体位置来提高分布。这是必要的操作,因为这些位置没有调整好,或是没能在垂直平面上平均分布。
您可能发现阅读活动臂的位置对填入X、Y、Z坐标系来说有一定帮助。阅读位置可自动使用臂的当前X、Y、Z位置。
选择定位和原点选项。
选择DCC校准选项。
点击校验。经过此次校验,可重新生成具有更加准确映射的armarm.dat文件。
对话框显示所用设置
下一步提供执行 DCC 校验的信息。