
用安装螺钉或磁性卡盘将夹具底座安装到稳定的平台上。
把臂基座的大线形环拧到固定基座上,将臂安装到固定基座上。
臂安全固定后,插上臂电源并验证电源打开。然后到步骤 6 前保持臂关闭。
若计算机上尚未安装 WinRDS(2.3.5 版或更高版本),请进行安装。从以下链接可下载 WinRDS 3.6:ftp://ftp.wilcoxassoc.com/Hardware/Portable/Romer/RDS/。安装 WinRDS 时,将在计算机桌面上放置两个图标;一个图标是 Cimcore 臂工具,另一个图标是快速检查工具。
WinRDS 2.3.5之前的版本与Perceptron 轮廓传感器结合使用的支持不够充分。
有两种方式与 Absolute 臂进行通信:通过 USB 连接或通过无线连接(如果您的计算机有无线网络接口卡 (NIC))。由于激光扫描仪需要很高的通信速度,因此当您使用 Perceptron Contour 传感器时,建议您通过 USB 端口将计算机连接到 Absolute 臂。本文未介绍无线通信。如果希望通过无线通信连接,请参考 Absolute 设置指南,以及随 WinRDS 安装的其他文档。
将通信电缆连接到臂和计算机的 USB 端口之一(或者,如果不使用 Perceptron Contour 传感器,请验证 Wi-Fi 通信)。
打开臂的电源开关。如果正在运行 Windows 计算机,计算机将会检测到连接,并询问是否希望为臂安装 USB 驱动。继续并安装 USB 驱动。
驱动程序安装完成后,双击桌面上的 Cimcore 臂工具图标以启动臂工具应用程序。当应用启动后,会自动尝试与机器连接。如果机器连接正确,就会与臂连接,并要求您将轴复位。如果有问题,请参考WinRDS和Cimcore文档。
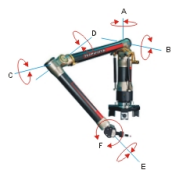
为了实现轴复位,将臂上所有的关节点移动至每一个关节点归零。随着所有的轴归零,轴的柱状图将会显示出如下图的样子。当所有的轴回位(归零),对话框会自动关闭。
此时会连接测量机,并准备好工作。