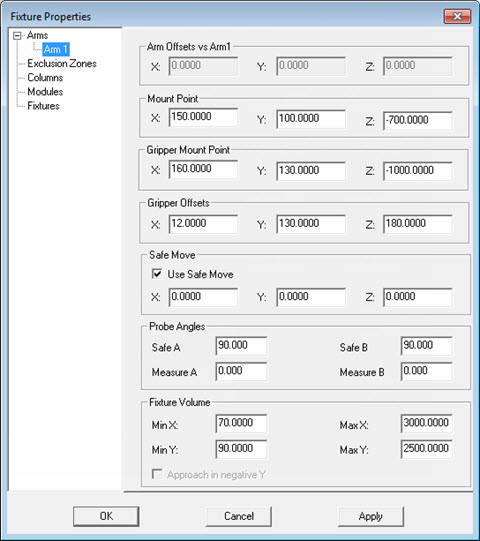
Cuadro de diálogo Propiedades de fixture - Propiedades de los brazos
Establezca las propiedades de los brazos en el cuadro de diálogo Propiedades.
Arm Offsets vs Arm1 (Offsets de brazo frente a brazo 1): Esta área define la ubicación del brazo indicado en relación con las coordenadas del brazo 1. Por ejemplo, el brazo 2 mide el centro de una esfera como (X2, Y2, Z2), mientras que el brazo 1 lee (X1,Y1,Z1). El offset del brazo será (X2-X1,Y2,Y1,Z2-Z1). En el caso del brazo 1, los valores de las coordenadas siempre son (0.0, 0.0, 0.0), puesto que esta es la relación del brazo 1 respecto a sí mismo.
Mount Point (Punto de montaje): Esta área proporciona una posición de seguridad a la que el brazo de la máquina se puede mover con seguridad, después de posicionar una o todas las columnas de una fixture.
Gripper Mount Point (Punto de montaje de la mordaza): Esta área define la ubicación en la que puede extraer o conectar el localizador de forma segura en el caso de un sistema manual.
Gripper Offsets (Offsets de mordaza): Esta área define los valores de los offsets de la mordaza tras la calibración. El offset de la mordaza se trata igual que un offset de sonda. El centro de la mordaza está unido a la máquina.
Safe Move (Movimiento seguro): Esta área especifica la ubicación XYZ a la que se traslada la máquina. Si opta por insertar movimientos intermedios, esto ayudará a eliminar las colisiones en la secuencia de la fixture. Seleccione la casilla Use Safe Move (Usar movimiento seguro) para activar los movimientos seguros.
Probe Angles (Ángulos de sonda): Utilice los cuadros Safe A (Seguro A) y Safe B (Seguro B) para definir la posición de seguridad del pulso cuando la mordaza está activada. Utilice los cuadros Measure A (Medir A) y Measure B (Medir B) de esta área para definir la posición de medición del pulso cuando la mordaza está desactivada.
Fixture Volume (Volumen de fixture): Esta área define los valores Min y Max para el volumen de fixture según las coordenadas XY. La casilla de verificación Approach in negative Y (Aproximación en Y negativa) se utiliza para los brazos esclavos de un sistema maestro-esclavo. Es posible que sea necesario invertir la dirección por la que la máquina esclava se acerca para hacer que la máquina se mueva en la dirección correcta.
Haga clic en Aplicar para aplicar los cambios que se han realizado para este brazo.
Haga clic en Aceptar cuando haya terminado de cambiar todas las propiedades de fixture.