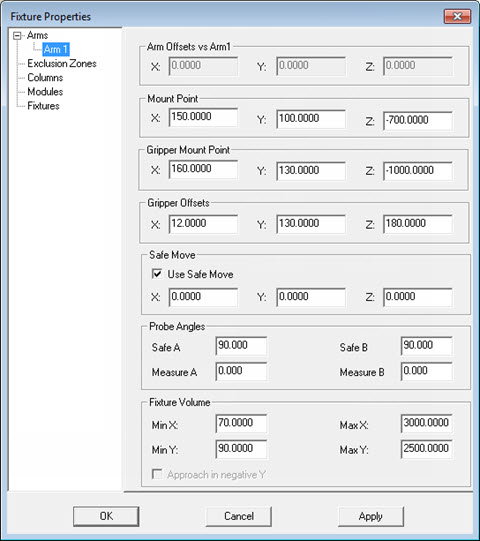
“夹具属性”对话框 - 臂属性
在属性对话框中设置臂属性。
臂偏置与臂 1 - 定义指定臂相对于臂 1 坐标的位置。例如,臂 2 将球体的中心测量为(X2,Y2,Z2),而臂 1 则读取(X1,Y1,Z1)。臂偏置是(X2-X1,Y2-Y1,Z2-Z1)。对于臂 1,坐标值将始终为 (0.0, 0.0, 0.0),因为这是臂 1 与自身的关系。
安装点 - 提供安全位置,定位夹具的一个或所有立柱之后机器臂可安全移至该位置。
定位夹安装点 - 定义在手动系统的情况下可安全删除或附加定位器的位置。
定位夹偏置 - 定义校准后定位夹的偏置值。定位夹偏置的处理方式与测头偏置一样。定位夹的中心与测量机连接。
安全移动 - 指定测量机将移至的 XYZ 位置。若选择插入中间移动,这将有助于消除夹具顺序中的冲突。选择使用安全移动复选框启用安全移动。
测头角度 - 启用定位夹后,使用安全A和安全B框定义测座的安全位置。禁用定位夹后,使用此区域中的测量A和测量B框定义测座的测量位置。
夹具体积 - 根据 XY 坐标定义夹具体积的最小和最大值。负 Y 中的逼近复选框用于主从系统的从动臂。可能需要逆转从测量机逼近的方向,以让测量机按正确方向移动。
单击 应用 ,应用对该臂做出的更改。
完成更改所有夹具属性后,单击确定。