このトピックでは 非表示
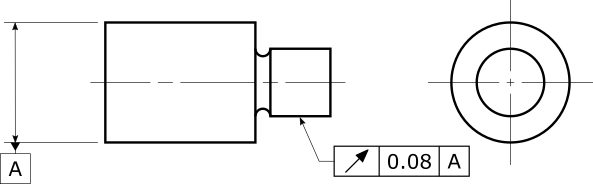
円周振れの仕様は、要素の表面断面が、基準軸を中心とする完全な円からどの程度逸脱できるかを制御します。
実際の値:
断面の場合、これは2つの円の間の最小距離です。これらの円は、基準軸を中心とし、基準軸に対して垂直に方向付けられます。それらはそれらの間の断面全体を含んでいます。
要素全体の場合、これはすべての断面の中で最悪の実際の値です。
上記の仕様では、いずれかの断面の実際の値は次のようになります:
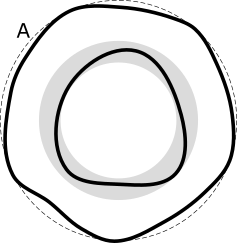
実際の部品表面は実線を使用し、実際の基準要素は破線を使用し、断面の表面を含む最小公差域が影付きの領域に表示されます。公差域は、実際の基準軸と正確に同軸です。要素全体の実際の値は、すべての断面の最悪の実際の値です。
最後に、いずれかの断面の測定値(DEFAULT基準演算を使用)は次のようになります:
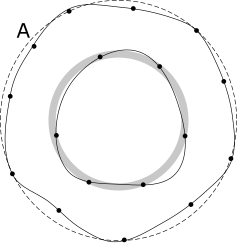
測定された公差域は、測定された基準軸と全くに同軸です。この場合、測定点が密に測定されなかったため、測定値が実際の値よりも小さくなっています。要素全体の測定値は、すべての断面の最悪の測定値になります。
面データを持つ円形、円筒形、円錐形、または平面の要素を使用できます。面データを持つ円、円柱、円錐、および平面の詳細については、「面データのある/ない要素タイプ」を参照してください。これらの要素は、基準軸と名目上同心でなければなりません。
この幾何公差は、円形要素を単一の断面として解釈します。
測定値:
これは、2つの円の間の距離です。円はそれらの間のすべての測定点を含みます。円は基準軸を中心とし、基準軸に垂直です。
通常、2つの円は同一平面上にあります。これは、面の円錐角がゼロであることを意味します。ただし、コマンドの「円錐半角」オプションを使用すると、円錐面を指定できます。その場合、PC-DMISは2つの円に角度を付け、公差域が公称面に垂直になるようにします。円錐の半角は公差域ではなく、公称表面の角度を表します。
外円の場合、正の角度は円のベクトルが円錐の頂点に向かっていることを意味し、負の角度は円のベクトルが円錐の頂点から離れていることを意味します。
内円の場合、正の角度は、円の頂点が円錐の頂点から離れていることを意味し、負の角度は、円のベクトルが円錐の頂点に向かっていることを意味します。
これらの内部および外部の規則は、一般的なデフォルトを表すために選択されました。ほとんどの場合、外円のベクトルは円錐の頂点—つまり正の角度の場合を指します。また、ほとんどの場合、内円のベクトルは円錐の頂点から離れた方向を向いています—正の角度の場合。
次の仕様があり、円錐を一連の円として測定することにしたとします(円錐要素の使用をお勧めしますが):
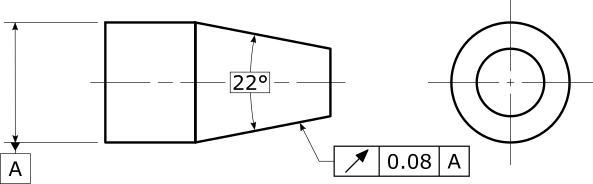
その場合、円は外円、つまり円のベクトルが右(円錐の頂点に向かって)を指している場合、円錐の半角を+ 11°に設定する必要があります。円のベクトルが左を向いている場合(円錐の頂点から離れている場合)、円錐の半角は-11°に設定する必要があります。
この幾何公差は、円筒形の要素からのデータを複数の断面に分割します。公差値は、各断面の振れを評価します。実際の断面が最悪となる可能性を最小化するために、多くの断面で円筒を測定することを推奨します。
測定値:
要素全体で、これは最悪の断面の測定値です。断面の測定データを測定しなかった場合、PC-DMISはエラーを出します。
この幾何公差は、円錐形の要素からのデータを複数の断面に分割します。公差値は、各断面の振れを評価します。各公差ゾーンを公称面に垂直に向けます。実際の断面が最悪となる可能性を最小化するために、多くの断面で円錐を測定することを推奨します。
測定値:
要素全体で、これは最悪の断面の測定値です。断面の測定データを測定しなかった場合、PC-DMISはエラーを出します。
この幾何公差は、データを平面要素から基準軸の周りの1つ以上の円形セクションに分割します。公差は、公称面に垂直に各公差ゾーンを向けます。実際の円断面が最悪となる可能性を最小化するために、多くの円断面で平面を測定することを推奨します。
測定値:
要素全体で、これは最悪の円形断面の測定値です。基準軸を囲む円形のセクションで測定データを測定しなかった場合、PC-DMISによってエラーが発生します。
データム参照フレームは、明確なデータム軸を確立する必要があります。
無し。この幾何公差では修飾子を使用できません。
円形要素の場合、「円錐半角」オプションを使用すると、円は、円筒面ではなく、円錐面の断面を表すことができます。これにより、公差範囲の方向が調整されます。正と負の両方の円錐半角は意味があり、これにより、公称円錐の開口方向が公称円のベクトルに平行か逆平行かを制御できます。
正の円錐半角をもつ内円の場合、円のベクトルは、小さな円錐の直径から大きな円錐の直径へと向かいます。負の円錐半角はその逆です。この規則が選択されたのは、正の角度がほとんどのユーザーにとって最も一般的なケースになるためです。
正の円錐半角をもつ外円の場合、円のベクトルは、大きな円錐の直径から小さな円錐の直径へと向かいます。負の円錐半角はその逆です。この規則が選択されたのは、正の角度がほとんどのユーザーにとって最も一般的なケースになるためです。
少なくとも1つのデータム要素に面データがある場合、データム計算タイプは、データム要素の面データから測定データムを計算する方法を制御します。詳細については、「PC-DMISデータの解決方法と使用基準」を参照してください。
以下は、円筒の円周振れ公差のレポート例です。
