このトピックでは 非表示
位置度の仕様は、目標要素が、0個以上のデータムに対して指定された位置からどれだけ逸脱できるかを制御します。
この幾何公差では、これらの3つの要素が連携して機能します:
目標要素と各生成の公差付きの要素
各公差域
データム要素(参照された場合)
この子さを評価するために、PC-DMISは目標要素を交差付きの要素に変換します。これについては、「公差付き要素の導出」で説明されています。
次に、PC-DMISは、各公差付き要素をそれぞれの公差ゾーンに最適化します。最適化プロセスは、各基準要素が課す制約を尊重します。目標要素が複数ある場合、最適化プロセスではすべての要素が同時に考慮されるため、すべての公差付き要素がそれらの公差ゾーンに一度に適合されます。このプロセスは物理的なゲージに似ており、すべてのゲージピンが同時にワークピースの穴に収まる必要があります。
次の要素タイプを使用できます:
球、表面のない3D点、円筒、円、円錐、幅、溝、切り欠き、構築された中央平面、構築された中央線および構築された中点。
ASMEの位置公差により、3Dで作成されたBF線も可能になります。ISO位置公差では、平面、線、および表面の点も許可されます。
構築された3D BF線、球、円筒、円、円錐、幅、溝および切り欠きには、考慮される要素の表面データとは異なる公差付き要素が存在します。詳しくは、「公差付き要素を取得する」を参照してください。
異なるタイプの要素に対して、さまざまな公差ゾーン形状が使用できます。異なる要素タイプを参照する要素コマンド種類の詳細については、「面データのあるとない要素タイプ」を参照してください。
点状の目標要素
目標要素が点状の場合、公差ゾーンの形状は、平面、直径、または球形になります。これらは、点状の目標要素です。
球または非3D表面の点
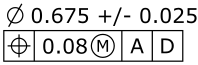
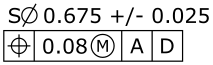
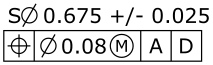
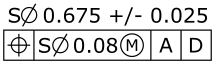
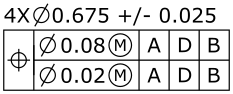
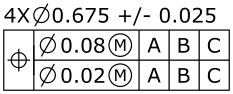
以下の写真は、左から右に、目標要素が球である場合の平面、直径、および球形の公差域を持つ公差記入枠を示しています:
要素にゾーンの方向を正しく設定するための十分な情報がないため、点状の目標要素の平面および直径公差ゾーンには、指定された公差ゾーンの向きが必要です。これらの場合、[幾何公差]ダイアログボックスの[ゾーンの方向]ボタンが表示されます。このボタンを使用してゾーンの方向を変更する方法については、「公差記入枠タブ」トピックの「ゾーンの方向」を参照してください。
例えば
、位置公差が位置のX要素(平面公差ゾーン)を制御する場合、公差ゾーン表面の法線ベクトルはXでなければなりません。
位置度公差が位置のXおよびY要素を制御する場合(直径公差ゾーン)、公差ゾーン軸ベクトルはZでなければなりません。
軸方向の目標要素
目標要素が軸方向である場合、公差域は平面、直径、ラジアルアーク、またはラジアルに垂直になります。これらは、軸方向の目標要素です:
円筒、円筒の円形断面、円錐、または表面のない軸
直径公差ゾーンは、直径ゾーン符号を使用して以下に示されています。
平面ゾーン、ラジアル アーク ゾーン、及びラジアルゾーンに垂直なゾーンは、公差ゾーンの形状記号を使用せず、以下に示します。
要素にゾーンの方向を正しく設定するための十分な情報がないため、軸方向の目標要素の平面公差ゾーンには、指定された公差ゾーンの向きが必要です。これらの場合、[幾何公差]ダイアログボックスの[ゾーンの方向]ボタンが表示されます。このボタンを使用してゾーンの方向を変更する方法については、「公差記入枠タブ」トピックの「ゾーンの方向」を参照してください。このボタンを使用して、ユーザーは放射状の弧または放射状のゾーンに垂直に指定することもできます。
位置公差が位置のX要素を制御する場合、公差ゾーン表面の法線ベクトルはXでなければなりません。
平面状のような目標要素
目標要素が平面に似ている場合、公差域は常に平面であり、公称表面に平行に方向付けられます。これらは、平面状の目標要素です:
平面、表面線、幅、溝、切り欠き、面上点または中点
目標要素を複数持つことができますが、それらの要素はすべて同じタイプでなければなりません。
溝および切り欠きについては注意を払ってください。
要素の形状が非常に良好であることが分かっている場合を除いて、以上の項目を使用してはいけません。作成された形状の誤差がかなり大きいと思われる場合は、溝または切り欠きコマンドを使用してはいけません。そうではなくて、要素の外周まわりでスキャンを測定した後に、 線の輪郭公差を用いて要素の形状、方向および位置の公差を決定します。
実績値:
それぞれの目標要素には、独自の実績値があります。これは、実際の公差要素を含む最小公差ゾーンのサイズです。「PC-DMISデータの解決方法」で説明されているいくつかの例外を除き、ゾーンは名目上に方向付けされ、実際の各基準要素に配置されます。位置公差に複数の目標要素が含まれ、データム参照フレームが完全に拘束されていない場合、最適化手順では、可能であれば、それぞれの公差ゾーン内のすべての公差付き要素を同時にフィットする必要があります。
測定値:
目標要素には、独自の測定値があります。これは、実測の公差要素を含む最小公差ゾーンのサイズです。「PC-DMISデータの解決方法」で説明されているいくつかの例外を除き、ゾーンは名目上に方向付けされ、実測の各基準要素に配置されます。位置公差に複数の目標要素が含まれ、データム参照フレームが完全に拘束されていない場合、PC-DMISの最適化手順は、すべての公差付き要素をそれぞれの公差ゾーンに比例的に同時に適合させ、できれば、すべての公差付き要素がそれぞれの対応の公差ゾーンに適合することを保証します。
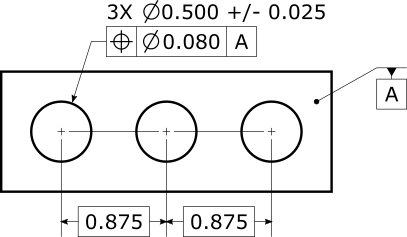
次の位置仕様があると想定します:
上記の仕様を使用すると、実測値は次のようになります:
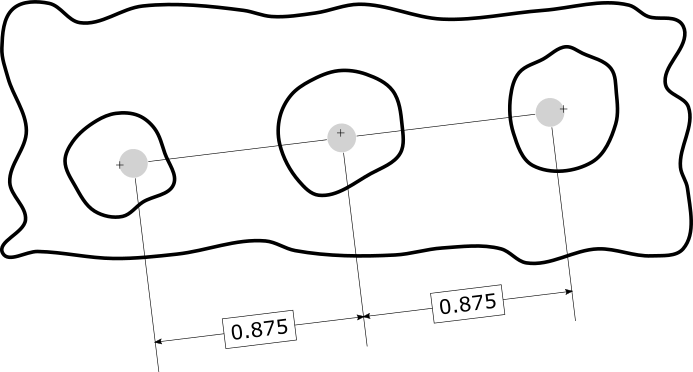
実際の部品表面は実線を使用し、実際の公差付き要素は小さな十字であり、実際の公差付き要素を含む最小公差ゾーンは影付きの領域に示されています。公差ゾーンは、公称的に配置されており、互いに対応され、およびデータムに方向付けられています。
目標要素には、各データム要素に対して何らかの理論の位置と向きが必要です。
すべての入力要素(検討済みおよび基準)には、指定された正しい公称値が必要です。これにより、測定値が正しく計算され、公差コマンドが最適化可能な自由度を正しく識別できるようになります。
軸方向の要素の平面域の場合、データム参照フレームは、公差域の方向を完全に拘束する必要があります。平面公差域の表面法線は、各目標要素の軸ベクトルに垂直でなければなりません。
ラジアルアークおよび軸方向要素のラジアル公差ゾーンに垂直の場合、次の要件に従います:
データム参照フレームは、明確な極原点と極軸を確立する必要があります。
軸方向の要素は、極軸に名目上で平行でなければなりません。
目標要素が円柱、球、または幅である場合、位置の公差値により、最大の実体修飾子 が仕様が最大の実体状態(MMC)であることを示すことができます。代わりに、最小実体修飾子が仕様が最小実体状態
が仕様が最大の実体状態(MMC)であることを示すことができます。代わりに、最小実体修飾子が仕様が最小実体状態 (LMC)であることを示すことができます。これは、無関係な嵌合エンベロープサイズ(またはLMCの無関係な最小材質エンベロープサイズ)がMMC(またはLMC)から外れると、追加の公差または「ボーナス」公差が要素制御フレームの公差に追加され、合計公差が得られることを意味します。このボーナス公差値の詳細については、「幾何公差コマンドによるサイズの評価」を参照してください。
(LMC)であることを示すことができます。これは、無関係な嵌合エンベロープサイズ(またはLMCの無関係な最小材質エンベロープサイズ)がMMC(またはLMC)から外れると、追加の公差または「ボーナス」公差が要素制御フレームの公差に追加され、合計公差が得られることを意味します。このボーナス公差値の詳細については、「幾何公差コマンドによるサイズの評価」を参照してください。
この例はインチです。ここに示すように、円筒形の穴の位置公差がMMCで0.08であるとします。
サイズ公差は0.675±0.025であり、これは許容できるサイズの範囲が0.650〜0.700であることを意味します。その場合、最大の実体状態は0.650です。関連のない測定された嵌合エンベロープサイズが0.661の場合、ボーナス公差値は0.011であり、総公差値は0.091です。
目標要素が自動要素円筒である場合、投影ゾーン修飾子 を使用できます。これは、「公差要素の導出」で説明されているように、測定された要素軸を投影(外挿)します。
を使用できます。これは、「公差要素の導出」で説明されているように、測定された要素軸を投影(外挿)します。
目標要素に面データがあり、公差付き要素が目標要素の面データ(球、円錐、円柱、円、幅)と異なる場合、要素の計算タイプは、目標要素の面データから公差付き要素を計算する方法を制御します。詳細については、「公差付き要素の導出」を参照してください。
少なくとも1つのデータム要素に面データがある場合、データム計算タイプは、データム要素の面データから測定データムを計算する方法を制御します。詳細については、「PC-DMISデータの解決方法と使用基準」を参照してください。
長さ方向および幅方向の溝」に記載のとおり、溝は長さ方向または幅方向のいずれかで考慮することができます。
複数のセグメントを持つ位置公差は、「複合位置」と呼ばれます。複合位置公差値は通常、要素のパターンで指定されます。複合位置の最初(または上位の)セグメントは、このページの前のセクションで説明した単一セグメント位置と同じです。合成位置のすべての下セグメントは微妙に異なります。これは、データム参照フレームと比較して、パターンの公差ゾーンの移動がロック解除されているためです。ただし、公差域は名目上、互いに向き合ったままです。
複合位置の下部セグメントのデータム参照フレームは、次のルールに従います:
各データム参照フレームは、その上の参照フレームと同じデータムのみを使用する必要があります。
データムは同じ順序でなければなりません。
データムには同じ修飾子を持つ必要があります。
下のセグメントは上のセグメントよりも少ないデータムを持つことができます。
上部セグメントにはデータムABCがあるとします。下部セグメントは、データムなし、データムA、データムAB、またはデータムABCを参照できます。ただし、データムBA、AC、ABDは参照できませんでした。
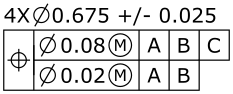
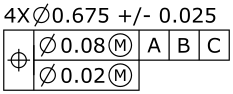
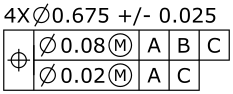
ここは許可された複合位置公差値の例をいくつか示します:
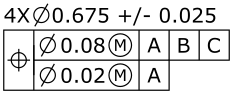
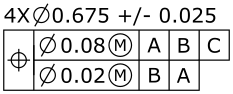
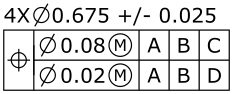
ここは許可されていない複合位置公差値の例をいくつか示します:
次は、2つの円筒の位置公差のレポート例です。円筒の寸法公差は上のラベルにあり、直径ゾーンの位置は下のラベルにあります。下部のラベルには、最適化されたフレーム(現在の整列ではない)での円筒のYZ位置に関する情報が含まれています。
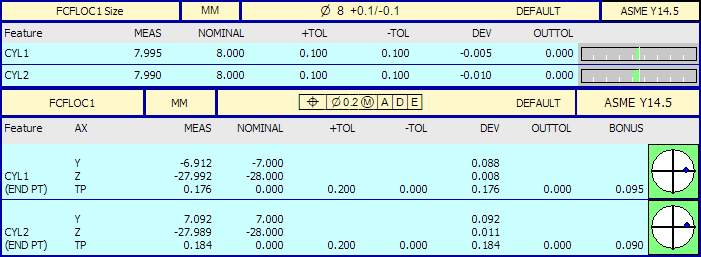
上の図の下のラベルでは、CYL1とCYL2のY、Z、およびTP行に、考慮される各要素の位置評価が要約されています。TPとラベル付けされたそれぞれの一番下の行は、他の幾何公差に関するすべてのレポートと同じように動作します。CYL2の場合、TP行には許容値0.200、ボーナス0.090、および測定値0.184が含まれます。
上記のサンプルレポートの下のラベルでは、各要素(Y、Z、およびTP)に3行しかありません。レポートに対しては、要素の軸列(AX)には、X、Y、Z、PR、PA、およびTPというラベルの付いた複数の行の組み合わせが含まれる場合があります。存在する場合、X、Y、Z、PR、およびPAの行は、以下に説明する補足情報を提供します。
CYL1とCYL2のY行とZ行は、位置評価に関する補足情報を提供します。これらの行は、要素が理想からどのように外れているかを簡略化して表すことを目的としています。
補足情報行のNOMINAL列は、問題要素の理論開始点を示します。
これらの行のDEV列は、許容される要素のすべての点の中で、最悪の偏差ベクトルを示します。
これらの行のMEAS列は、NOMINAL列とDEV列です。言い換えると、これは、最悪の偏差ベクトルを維持しながら、理論開始点に可能な限り近くなるように投影された後の、許容要素の最悪点です。
要素名の下に、レポートは円筒のどちらの端またはレベルが最悪であったかを示します。たとえば、「(開始点)」、「(終了点)」、または「レベル#3」と言うことができます。
許容要素の導出で説明されたように、ほとんどの要素タイプには、許容要素に複数の点があるため、表現は簡略化されます。例えば、円筒には通常、公差要素に少なくとも2つの点、測定された開始点と測定された終了点があります。対照的に、ISO円筒には、許容断面積ごとに1つずつ、交差範囲内にいくつかの点がある場合があります。
テキスト分析または図形分析をオンにすると、許容要素内のすべての点と、それぞれの偏差を確認できます。レポートの補足情報の行には、テキスト分析に必ずしも表示されないMEAS列があります。これは、補足情報が簡略化されて、理論開始点に対する偏差を示すためです。