[挿入|ハードウェア定義|プローブ]メニュー項目を選択し、[プローブ ユーティリティ]ダイアログボックスを開きます。(新しい測定ルーチンを作成するたびにこのダイアログボックスが自動的に表示されます。)
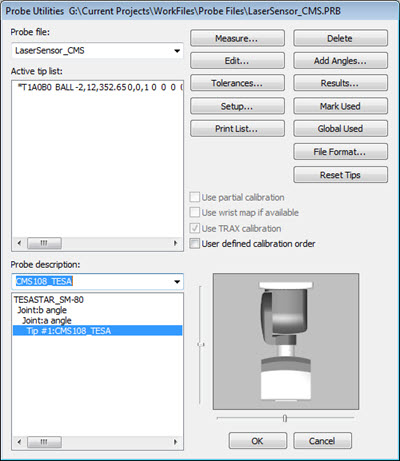
プローブ ユーティリティ ダイアログ ボックス
プローブファイルボックスにレーザーセンサーを最適に説明する名前を入力します。
最後にあるコンポーネントリストから定義済みのプローブがないテキストを選択して強調表示します。
プローブの説明リストから適切なプローブを選択します。大部分のレーザーセンサーはPH10M プローブヘッドに直接接続します。DCC機械で使用するCMS 108センサーはTesastarプローブヘッドに接続します。CWSまたはWLSセンサーは、TKJコネクターを使用するか、またはマルチセンサー機のOPTIV_FIXEDで手首に取り付けることもできます。
必要に応じて、プローブの定義が完了するまで、「空の接続」での方法と同じ方法で追加コンポーネントを選択します。プローブが定義されると、アクティブなルビーリストにルビーが表示されます。
ルビーを定義すると、ソフトウェアはプローブ画像を表示しなくなります。これによって、測定中にプローブのグラフィックス画像がパートの表示を遮らなくなります。但し、プローブコンポーネントの表示を可能にしたい場合は、プローブコンポーネントをダブルクリックして、プローブコンポーネントの編集ダイアログボックスを開きます。このコンポーネントを描画チェックボックスをチェックします。
PH10、Tesa、連続型のリストをCジョイントと共に使用する場合、ジョイント角度が良く見えるよう適切に調整されているか確認する必要があります。そうでない場合、PC-DMISはセンサーのデータと機械の位置を正しく関連付けることができません。プローブがジョイント周りに正しく回転しない場合、手動で余分に回転させることができます。これを行うには、コンポーネントを右クリックし、必要とされる回転を反映するように接続部周りのデフォルト回転角度値を変更します。
プローブファイルはジョイント周りのセンサーの向きを定義せず、プローブベクトルのみを定義します。