Nivel 傾斜センサはLeica Geosystemsレーザートラッカーシリーズで使用するように設計されます。
Nivel センサーの構成と使用について詳しくは、Nivel センサーに付属のドキュメントを参照してください。重力レベリングは必須ではありませんが、ライカトラッカーの測定結果を実際に向上させます。
LMFトラッカー
LMFトラッカーの場合、ニベルはトラッカーのヘッドに付属しています。
重力に対するレベルとLeica LMFトラッカーのモニター
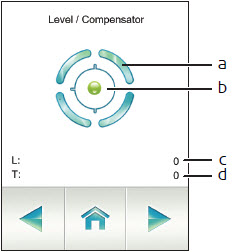
気泡の位置がL (縦方向の傾き) および T (横方向の傾き) においてできるだけゼロに近くなるように、三脚またはBrunsonスタンドの脚を調整します。ゼロから+/- 20以内に入っている必要があります。
a - 傾斜センサーの状態
b - 電子レベル気泡
c - 縦方向の傾き (無単位)
d - 横方向の傾き (無単位)
傾斜センサーの状態 |
|
ステータスアイコン |
内容 |
|
無効 |
|
作動範囲外 |
|
作動可能 |
|
重力方向測定 (OTG) を正常に実行するのに十分な程度に有効で水平である |
トラッカーが水平で、許容動作範囲にあるとき、 トラッカー| ニベル | 重力に対して水平プロセスメニュー項目を選択します。レーザートラッカーはレーザートラッカーの4象限すべてでニベル測定を実行します。次に、レーザートラッカーは汎用平面要素と、この平面に基づく水平化センサー座標系を作成します。
追加の新規アライメントコマンドは必要に応じて重力情報を使用することができます。
システムを水平にしたらトラッカー|ニベル|傾斜読み出しの開始メニュー項目を選択して、傾斜読み出しウィンドウを表示します。傾斜計測値ウィンドウでは、1秒あたり3回ニベル測定を読むことができます。必要に応じて画面を最大化することができます。

傾斜読み出しウィンドウを使用したトラッカーの重力に対する水平度のモニター
傾斜読み出しウィンドウを使用して、システムの重力に対する水平度をモニターします。詳細については、センサーに付属のドキュメントを参照してください。
随意でトラッカー| ニベル | モニターを開始メニュー項目を選択します。これは Leica トラッカーの状態の監視を開始します。機械オプションダイアログボックスの重力に対してレベルするタブはレベルされるステータスに関する情報を提供します。60秒ごとに基準 Nivel 測定が実行され、元の方向と比較されます。
監視プロセスにより、誰もトラッカーを動かすことができません。重力平面が必要ない場合は、明示的に開始することができます。この場合、システムの安定性のみを監視する必要があります。
AT-90xトラッカー
AT-90xトラッカーの場合、ニベルは「重力方向」パラメータを確立するために、センサーユニット上部または概観カメラ/ T-CAMの上部に取り付けます。次に、それはブラケットにマウントされて、レーザートラッカーの安定性をモニターします。
重力へのレベルとLeica LMFトラッカーのモニター
ニベルセンサーをライカトラッカーのトップまたはT-Cam のトップへマウント (それが既にトラッカーにマウントされた場合にいは)します。ニベルセンサーに付属のドキュメントを参照してください。
ニベルにLEMO ケーブルを接続します。
トラッカー|ニベル|スタート傾斜読み込み メニューオプションを選択して傾斜読み込み ウィンドウを表示します。傾斜計測値ウィンドウでは、1秒あたり3回ニベル測定を読むことができます。必要に応じて画面を最大化することができます。
傾斜リードアウトウィンドウを使用して約トラッカーを平準化します。
傾斜読み出しウィンドウを使用し、ニベルセンサーに付属のドキュメントにある手順に従って、Leicaトラッカーベースとニベルを水平にします。
トラッカーがほぼ水平で、許容動作範囲にあるとき、トラッカー| ニベル | 重力に対して水平プロセスメニュー項目を選択します。レーザートラッカーはレーザートラッカーの4象限すべてでニベル測定を実行します。次に、レーザートラッカーは汎用平面要素と、この平面に基づく水平化センサー座標系を作成します。
追加の新規アライメントコマンドは必要に応じて重力情報を使用することができます。
一旦手続きが完了されたら、PC-DMISは監視位置にニベルを移動するように求められます。
ニベルセンサーに付属のドキュメントの手順に従ってニベルをモニター位置に取り付けます。
随意でトラッカー| ニベル | モニターを開始メニュー項目を選択します。これは Leica トラッカーの状態の監視を開始します。機械オプションダイアログボックスの重力に対してレベルするタブはレベルされるステータスに関する情報を提供します。60秒ごとに基準 Nivel 測定が実行され、元の方向と比較されます。
監視プロセスにより、誰もトラッカーを動かすことができません。重力平面が必要ない場合は、明示的に開始することができます。この場合、システムの安定性のみを監視する必要があります。



