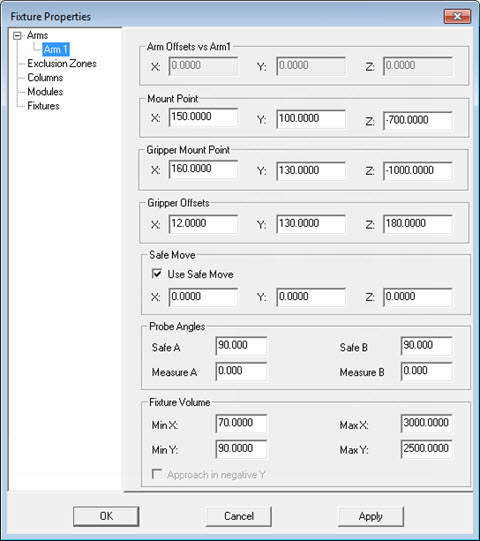
Dialogrutan Fixturegenskaper - Armegenskaper
Ange egenskaperna för armar i dialogrutan Egenskaper.
Armoffset vs. arm 1 - Det här området definierar läget för den aktuella armen i relation till koordinaterna för arm 1. Anta till exempel att arm 2 mäter centrum av en sfär som (X2,Y2,Z2) och arm 1 läser (X1,Y1,Z1). Armoffset blir då (X2-X1,Y2,Y1,Z2-Z1). Om den aktuella axeln är arm 1 blir koordinatvärdena alltid (0.0, 0.0, 0.0) eftersom det är relationen till sig själv (arm 1).
Startpunkt - Det här området ger ett säkerhetsläge som maskinen säkert kan flyttas till efter det att en eller alla pelare för en fixtur har positionerats.
Startpunkt för gripdon - Det här området definierar läget där du kan ta bort eller montera gripdonet på ett säkert sätt i manuella system.
Gripdonsoffset - Det här området definierar värdena för gripdonsoffset efter kalibrering. Gripdonsoffset behandlas på samma sätt som offset för ett mäthuvud. Mitten av gripdonet länkas till maskinen.
Säker flyttning - Det här området specificerar XYZ-läget som maskinen flyttar till. Om du väljer att infoga mellanliggande rörelser hjälper detta till att eliminera kollisioner i din fixtursekvens. Markera kryssrutan Använd säker flyttning för att aktivera säkra flyttningar.
Mäthuvudsvinklar - Använd rutorna Säker A och Säker B för att definiera säkerhetsläget för det vridbara mäthuvudet när gripdonet är aktiverat. Använd rutorna Mät A och Mät B i det här området för att definiera mätläget för det vridbara mäthuvudet när gripdonet är inaktiverat.
Fixturvolym - Det här området definierar min- och max-värdena för fixturvolymen i form av XY-koordinater. Kryssrutan Anlopp i negativ Y används för slavarmar i master-slav-system. Det kan vara nödvändigt att kasta om riktningen för anloppet av slavarmen för att maskinen ska flyttas i rätt riktning.
Klicka på Verkställ för att använda ändringarna som gjorts för armen.
Klicka på OK när du är klar med ändringarna av alla fixturegenskaper.