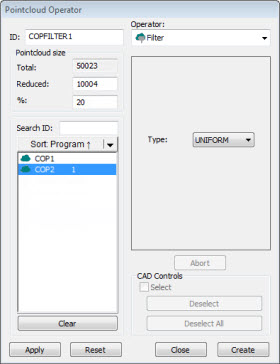
Dialogrutan Punktmängdsåtgärd - åtgärden Filter
Med åtgärden filter filtreras data till en mindre undergrupp av punkter.
Använd åtgärder filter på en punktmängd genom att utgå från verktygsfältet Punktmängd och klicka på Filtrera punktmängd ( ) eller välja Åtgärd | Punktmängd | Filter.
) eller välja Åtgärd | Punktmängd | Filter.
Åtgärden filter har följande alternativ:
Typ - Indikerar typen av filter som ska användas:
HOMOGEN - Det här alternativet genererar en undergrupp av punkter som är jämnt fördelad i X-, Y- och Z-riktningarna. Resultatet har samma effekt som ett jämnt fördelat 2D-rutnät men i detta fallet är effekten ett 3D-rutnät.
KURVATUR - Det här alternativet genererar en undergrupp av punkter med de största beräknade kurvaturerna, främst längs kanterna, hörnen och områden på ytan med stora krökar.
SLUMP - Det här alternativet genererar en undergrupp av punkter jämnt fördelad i punktmängden.
AVSTÅND - Det här alternativet genererar en undergrupp av punkter där punkterna ligger på minst det angivna avståndet från varandra.
Avstånd - När du väljer AVSTÅND specificerar värdet du anger i rutan avståndet för avståndsfiltret.
INFALLSVINKEL – Det här alternativet genererar en delmängd av punkter som utesluter (eller filtrerar ut) punkter med en normalvektorriktning som faller utanför den angivna vinkeln i förhållande till lasersensorns riktning. Med det här filtret kan du ta bort laserpunkter som orsakas av sekundära reflektioner eller "brus". Du kan se effekten av det här filtret när du klickar på knappen Verkställ i dialogrutan.
Giltiga värden är reella tal från 10 till och med 90.
För att filtret ska kunna användas måste det finnas vektorinformation för punktmängdsdata.
STÖRNINGSREDUCERING - Filtret Störningsreducering fungerar på den globala tätheten för den valda punktmängden. Punkter som är för långt borta från den globala tätheten för punktmängden tas bort.
Skjutreglaget representerar min- och maxvärdena för filtret Störningsreducering. Minvärdet representerar 0 (noll). Noll innebär att inget reduceringsfilter används på data. Maxvärdet representerar det högsta värdet som du kan ställa in reduceringsfiltret på. Det högsta värdet är 99. Standardvärdet är 80 vilket är värdet som skjutreglaget i bilden ovan är inställt på.
När du flyttar skjutreglaget uppdaterar PC-DMIS visningen i Grafikfönstret så att uteslutna punkter visas i rött. Punkter som inkluderas visas i grönt.
Så filtrerar du PKTMGD-data:
Välj en filtertyp från listan Typ.
Välj punktmängdskommandot där du vill använda filtret i kommandolistan.
Ange det antal punkter eller en den procentsats punkter som ska bevaras efter filtreringen i rutan Reducerat eller %. Används inte för filtret Avstånd.
Klicka på Verkställ.
Data filtreras i PC-DMIS och resultatet visas i Grafikfönstret. Storleken på filtrerad data kan skilja sig något från värdet du angav. Detta märks tydligare när du kör mätrutinen och data samlas in av programvaran från scankommandona. Det är normalt omöjligt att hämta in samma antal punkter från en lasersensor som upprepade gånger scannar samma enhet.
Klicka på Skapa när du är nöjd med resultatet. PC-DMIS lägger till kommandot PKTMGD/OPER,FILTER i mätrutinen som innehåller all information om filtret som du nyss använde.
Anta att PKTMGD1 från början hade 10 000 punkter och du hade kommandot PKTMGD/OPER,FILTER i Redigeringsfönstret:
PKTMGDFILTER3=PKTMGD/OPER,FILTER,HOMOGEN,STL=3000
REF,PKTMGD1,,
Filtret ersätter de 10 000 punkterna i PKTMGD1 med de filtrerade 3 000 punkterna. PKTMGD1 innehåller sedan de filtrerade 3 000 punkterna för punktmängden.