HP-L sensörleri, Prob Araç Kutusu'nun Lazer Tarama Özellikleri sekmesinde en altta bulunan Yakınlaştırma adlı ek bir alan sağlar. Bu alan sensöre öntanımlı yakınlaştırma durumlarında çalışmasını söyler; her durum sensör frekansı, veri yoğunluğu ve Görüş Alanı (FOV) genişliğinin spesifik bir kombinasyonundan oluşur.
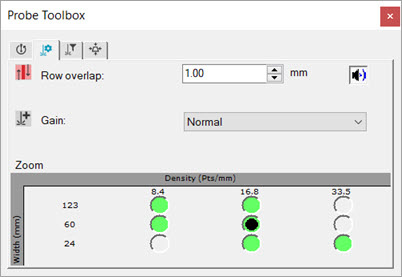
Prob Araç Kutusu - Örnek Yakınlaştırma alanıyla birlikte Lazer Tarama Özellikleri sekmesi
Yakınlaştırma alanda sütunlar ve satırlar halinde düzenlenmiş bir seçenek düğmeleri kılavuzu görüntülenir. Yukarıda, "sütunlar" veri yoğunluğunu gösterir. Yan tarafta, "sıralar" FOV genişliğini listeler. Yalnızca doğru kombinasyonları seçebilirsiniz (bunlar yeşil arka planı olan seçenek düğmeleridir). Yazılım uygun olmayan kombinasyonları gri yapar.
Fare işaretçinizi herhangi bir geçerli seçenek düğmesinin üzerine getirerek seçeneğin ayrıntılı tarama modu bilgilerini veren sarı bir araç ipucu görüntüleyebilirsiniz.

Prob Araç Kutusu - Örnek Yakınlaştırma alanında araç ipucunu gösteren Lazer Tarama Özellikleri sekmesi
HP-L Tarama Yakınlaştırma Durumları Örnekleri
Yardım görüntüleyicinizi maksimize edin ve daha sonra aşağıdaki resimleri tıklayın. Farklı tarama durumları Lazer sekmesindeki görüntüyü nasıl değiştirdiğini fark edin:
4.1 Nok/mm ve 124mm Genişlik

8,4 Nok/mm ve 60mm Genişlik

16,8 Nok/mm ve 24mm Genişlik

HP-L-20.8 için Mevcut Tarama Yakınlaştırma Durumları

HP-L-20.8 sensörü için olası tarama durumları örneği