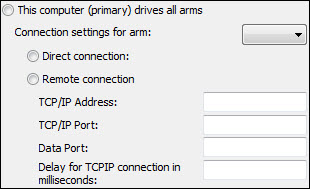
The This computer (primary) drives all arms option in the Multiple Arm Setup dialog box (Edit | Preferences | Multiple Arm Setup) enables the computer to be the main computer that drives all the arms. You can choose to connect the computer to the other arms using either a direct connection or a remote connection.
If you choose the Remote connection option, you need to fill out the available fields to establish the connection:
Select the arm from the Connection settings for arm list.
Type the IP address in the TCP/IP Address box.
Type the IP address's port number in the TCP/IP Port box.
Type the data port number in the Data Port box.
Specify the TCP/IP connection delay in the Delay for TCPIP connection in milliseconds box. This value is the number of milliseconds that PC-DMIS delays before attempting a TCP/IP connection to the specified arm from the current computer.
More: