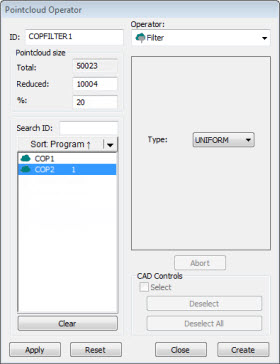
Boîte de dialogue Opérateur Nuage de points - Opérateur Filter
L'opération filtre les données dans un sous ensemble de points.
Pour appliquer l'opération Filtrer à un nuage de points, dans la barre d'outils Nuage de points, cliquez sur Filtrer nuage de points ( ), ou sélectionnez Opération | Nuage de points | Filtrer.
), ou sélectionnez Opération | Nuage de points | Filtrer.
L'opérateur FILTER utilise les options suivantes :
Type - Indique le type d'opérateur de filtre à appliquer :
UNIFORM – Cette option génère un sous-ensemble de points distribués de façon régulière dans les directions X, Y et Z. Il donne le même résultat qu'une grille standard en 2D, sauf que le résultat est dans ce cas une grille 3D.
CURVATURE - Cette option génère un sous-ensemble de points avec les courbes estimées les plus élevées, surtout autour des arêtes, des sommets et des zones très courbes.
RANDOM - Cette option génère un sous-ensemble de points de façon aléatoire dans le nuage de points.
DISTANCE – Cette option génère un sous-ensemble de points qui sont au moins séparés les uns des autres de la valeur Distance indiquée.
Distance - Quand vous sélectionnez DISTANCE, la valeur entrée dans cette zone indique la distance pour le filtre de distance.
INCIDENCE ANGLE - Cette option génère un sous-ensemble de points qui exclut (filtre) les points avec une orientation de vecteur normal tombant en dehors de l'angle indiqué par rapport à l'orientation du capteur laser. Ce filtre vous permet pour supprimer des points laser causés par des réflexions secondaires ou « bruit ». Vous pouvez voir le résultat de ce filtre après avoir cliqué sur le bouton Appliquer dans la boîte de dialogue.
Une valeur valide est un nombre réel compris entre 10 et 90 inclus.
Pour utiliser ce filtre, les données du nuage de points doivent avoir des informations de vecteur.
RÉDUCTION DE BRUIT - Le filtre Noise Reduction fonctionne sur la densité globale du nuage de points sélectionné. PC-DMIS supprime les points trop éloignés de la densité globale du nuage de points.

Le curseur indique les valeurs minimum et maximum pour le filtre Réduction de bruit. La valeur Min correspond à 0 (zéro). La valeur zéro suppose que le logiciel n'applique aucun filtre de bruit aux données. La valeur Max représente la valeur la plus élevée à laquelle vous pouvez définir le filtre de bruit. La valeur la plus élevée est 99. La valeur par défaut est 80 ; l'image ci-dessus illustre le curseur placé à cette valeur.
Quand vous déplacez le curseur, PC-DMIS met à jour l'affichage dans la fenêtre d'affichage graphique afin de montrer les points exclus en rouge. Le logiciel conserve les points inclus en vert.
INTENSITÉ - Si le nuage de points sélectionnés contient des valeurs d'intensité, vous pouvez utiliser le filtre INTENSITÉ pour définir une plage d'intensité dans laquelle PC-DMIS conserve uniquement les points se trouvant dans cette plage définie.

Actuellement, seuls le pisteur laser AT600 et le capteur laser HPL-10.10 peuvent fournir des valeurs d'intensité.
Les curseurs indiquent les valeurs minimum et maximum pour la plage d'intensité. Avec les curseurs définis dans l'image ci-dessus, tous les points avec des valeurs d'intensité entre 0,20 et 0,50 seraient conservés.
Quand vous réglez les curseurs, PC-DMIS met à jour de façon dynamique la fenêtre d'affichage graphique pour montrer les effets de ce filtre.
Pour filtrer des données COP :
Dans la liste Type, sélectionnez un type de filtre.
Sélectionnez la commande de nuage de points à appliquer au filtre dans la liste de commandes.
Dans les zones Réduite ou %, indiquez le nombre ou le pourcentage de points à conserver après application du filtre. Ceci ne s'applique pas au filtre Distance.
Cliquez sur le bouton Appliquer.
PC-DMIS filtre les données et la fenêtre d'affichage graphique montre le résultat. La taille des données filtrées peut varier légèrement de la valeur indiquée. Cette différence est d'autant plus grande lorsque vous exécutez la routine de mesure et que le logiciel collecte les données depuis des commandes de scanning. Il est généralement impossible d'obtenir le même nombre de points d'un capteur laser si vous scannez à plusieurs reprises la même entité.
Quand les résultats sont acceptables, cliquez sur le bouton Créer. PC-DMIS ajoute une commande COP/OPER,FILTER à la routine de mesure contenant toutes les informations liées au filtre appliqué.
Imaginez que votre COP1 avait 10 000 points au départ et que vous avez cette commande COP/OPER,FILTER dans la fenêtre de modification :
COPFILTER3=COP/OPER,FILTER,UNIFORM,SIZE=3000
REF,COP1,,
Le filtre remplace les 10 000 points conservés dans COP1 par les 3 000 points filtrés. COP1 inclut alors les 3 000 points filtrés pour son nuage de points.