
Finestra di dialogo Operatore Nuvola di punti - Operatore filtro
L'operazione Filtra filtra i dati per ricavare un sottoinsieme più piccolo di punti.
Per applicare l'operazione Filtra a una nuvola di punti fare clic sul pulsante Filtra nuvola punti ( ) nella barra degli strumenti Nuvola di punti o selezionare la voce del menu Operazione | Nuvola di punti | Filtra.
) nella barra degli strumenti Nuvola di punti o selezionare la voce del menu Operazione | Nuvola di punti | Filtra.
L'operatore Filtra offre le seguenti opzioni.
Tipo - Questa opzione indica il tipo di filtro da applicare:
UNIFORME – Questa opzione genera un sottoinsieme di punti distribuiti uniformemente lungo le direzioni X, Y e Z. L'effetto è identico a quello di una griglia bidimensionale a maglie regolari, ma in questo caso è tridimensionale.
CURVATURA – Questa opzione genera un sottoinsieme di punti con le maggiori curvature stimate, soprattutto intorno a bordi, vertici e parti di superfici molto ricurve.
CASUALE - Questa opzione genera un sottoinsieme di punti distribuiti in modo casuale nella nuvola di punti.
DISTANZA – Questa opzione genera un sottoinsieme di punti la cui distanza reciproca è almeno pari al valore specificato nella casella Distanza.
Distanza - Quando si seleziona l'opzione DISTANZA, il valore immesso in questa casella specifica la distanza usata dal relativo filtro.
ANGOLO DI INCIDENZA - Questa opzione genera un sottoinsieme di punti che esclude (cioè filtra) i punti che hanno un orientamento del vettore normale che ricade fuori da uno specifico angolo rispetto all'orientamento del sensore laser. Questo filtro permette di rimuovere i punti laser causati da riflessi secondari o “rumore”. Si può vedere l'effetto di questo filtro dopo aver fatto clic sul pulsante Applica nella finestra di dialogo.
È valido qualsiasi valore compreso tra 10 e 90 inclusi.
Per poter usare questo filtro, i dati della nuvola di punti devono contenere le informazioni sui vettori.
RIDUZIONE DEL RUMORE - Il filtro Riduzione del rumore opera sulla densità globale della nuvola di punti selezionata. PC-DMIS rimuove i punti che sono troppo lontani dalla densità globale della nuvola di punti.

Il cursore indica i valori minimo e massimo del filtro di riduzione del rumore. Il valore Min rappresenta 0 (zero). Zero significa che il software non applica ai dati il filtro di riduzione del rumore. Il valore Max indica il valore massimo a cui è possibile impostare il filtro di riduzione del rumore. Il valore massimo è 99. Il valore predefinito è 80 ed è quello su cui è impostato il cursore nell'immagine precedente.
Come si muove il cursore, PC-DMIS aggiorna la visualizzazione nella finestra di visualizzazione grafica per mostrare in rosso i punti esclusi. Il software mostra i punti inclusi in verde.
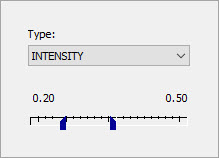
INTENSITÀ - Se la nuvola di punti selezionata contiene valori dell'intensità, si può usare il filtro INTENSITÀ per definire l'intervallo dei valori dell'intensità entro il quale PC-DMIS acquisirà i punti.
Attualmente, solo il tracker laser AT600 e il sensore laser HPL-10.10 possono fornire i valori dell'intensità.
I cursori permettono di regolare i valori massimo e minimo dell'intervallo di intensità. Con i cursori impostati come nell'immagine precedente, saranno acquisiti tutti (e solo) i punti con valori dell'intensità compresi tra 0.20 e 0.50.
Durante la regolazione dei sensori PC-DMIS aggiorna dinamicamente la finestra di visualizzazione grafica per mostrare gli effetti di questo filtro.
Per filtrare i dati di una nuvola di punti, procedere come segue.
Scegliere un tipo di filtro dall'elenco Tipo.
Nell'elenco dei comandi, selezionare il comando Nuvola di punti a cui si desidera applicare il filtro.
Specificare il numero di punti, oppure la percentuale da mantenere dopo l'applicazione del filtro nelle caselle Ridotto o %. Quanto detto sopra non vale per il filtro Distanza.
Fare clic sul pulsante Applica.
PC-DMIS filtra i dati e il risultato viene visualizzato nella finestra di visualizzazione grafica. La dimensione dei dati filtrati può differire leggermente dal valore impostato. Questo è anche più evidente quando si esegue la routine di misurazione e il software raccoglie i dati dai comandi di scansione. In generale non è possibile ottenere lo stesso numero di punti da scansioni ripetute della stessa entità eseguite con un sensore laser.
Quando i risultati sono accettabili, fare clic sul pulsante Crea. PC-DMIS aggiungerà alla routine di misurazione un comando COP/OPER,FILTER contenente tutte le informazioni relative al filtro applicato.
Si supponga che NUV1 abbia inizialmente 10.000 punti e che si abbia questo comando NUV/OPER,FILTRO nella finestra di modifica:
FILTRONUV3=NUV/OPER,FILTRO,UNIFORME,DIMENSIONE=3000
REF,NUV1,,
Il filtro sostituisce i 10.000 punti di NUV1 con i 3.000 punti filtrati. NUV1 contiene quindi i 3.000 punti filtrati per questa nuvola.
PC-DMIS contrassegna i 7000 punti non utilizzati in modo che si possa annullare il filtraggio con l'operazione Reimposta.
È possibile eliminare definitivamente i 7000 punti non usati da PC-DMIS con l'operazione RIPULISCI.
Per ulteriori informazioni, Vedere “REIMPOSTA” e “RIPULISCI”