将第 13 步用作指南,执行以下操作:
在初始命令中添加(TEMPCOMP、MOVE//SYNC,以及LOADPROBE命令)。
此种情况下,您需要所有测头的一个LOADPROBE命令(短、中和长扩展名)。
按F9确保每个选择使用测座映射(若有的话)。点击添加角。
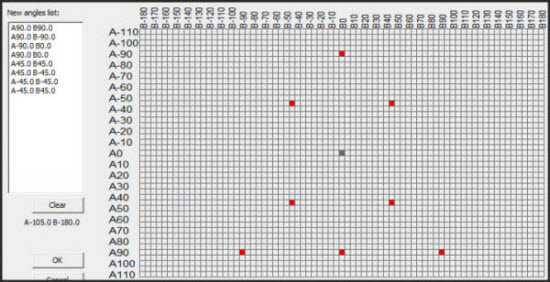
使用每个测头的添加新角度框 并为所需的测头添加至少9个角度。建议使用这些角度,因其可带来足够准确的分布: [0,0] [90,90] [90,-90] [-90,0] [-90,0] [45,45] [45,-45] [-45,-45] [-45,45]
实例添加新角度对话框显示所建议的角度
为了提高精度,可以将角度增加到 17,但这会延长更新的执行时间。
为该测座所推荐的17个角度是:
([0,0] [90,0] [90,-45] [90,-90] [90,-135] [90,45] [90,90] [90,135] [-90,0] [45,-20] [45,-65] [45,-110] [45,-155] [45,25] [45,70] [45,115] [45,160])
进入测量测头对话框并定义每个测头的参数设置。确保选择DCC+DCC和校准测尖。
根据测头名来为每个参数设置命名,并添加一个“_UPDATE(更新)” 后缀。比如,ARM1_1的参数设置名为ARM1_1_UPDATE。
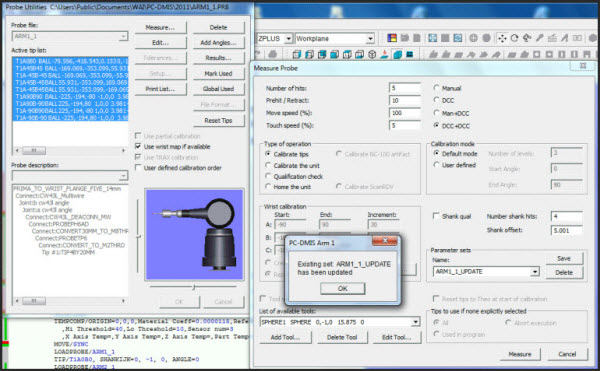
参数设置实例创建
在每个LOADPROBE命令设置后插入两个与这些加载测头参数设置对应的AUTOCALIBRATE(自动校验)命令。
在每个AUTOCALIBRATE对后面插入一个MOVE/SYNC命令。
在每对AUTOCALIRBRATE(自动校验)之间以及MOVE/SYNC(移动/同步)命令后面,插入一些安全移动命令,以防止机器臂在交换测头更改器里面与外面的测头时可能发生的碰撞破裂问题。
此时,例程结构应类似于:
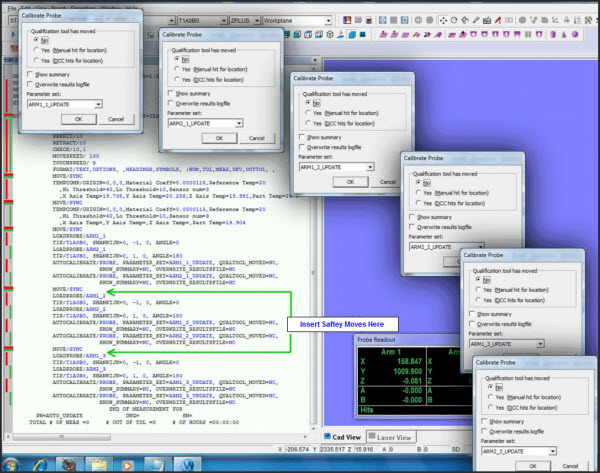
示例 AUTO_UPDATE.PRG 例程
添加这些命令继续:
转至例程末尾,为 ARM1_1 和 ARM2_1 添加 LOADPROBE 命令。
插入一个AUTOCALIBRATE/MULTIPLEARM (多臂)命令,并按F9。出现自动校验多臂对话框。
对于第一臂,选择CMM1。对于第二臂,选择CMM2。
选择双臂测量工具
选择DCC校验。
从可用工具列表中选择 SPHERE3。
最后一部分可使双臂上的短扩展名测量SPHERE3以期最后一次调整臂1和臂2的关系。通常情况下,您只需在使用机器一个月后使用这一最终命令(或在多次测量后)以便经常地调整偏置,提高准确度。
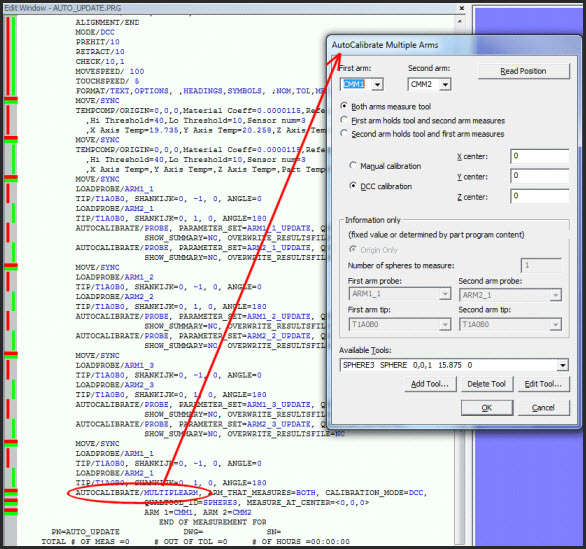
自动校验多机械臂对话框示例
运行最后一部分例程之前,确保将校准球体(SPHERE1、SPHERE2 和 SPHERE3)已放回工作台。
使用 AUTO_UPDATE.PRG的注释
您将运行此测量例程在上述实例中更新特定测尖的映射:
每当您想调整机器的准确性
每当您想调整测尖或需要添加一个新测尖
此例程比 AUTO_MAPS.PRG 更常用。
带有更新参数和1扩展的典型AUTOCALIBRATE(自动校验)命令利用执行块命令可实现。
为所有测头延伸件运行整个测量例程,使用建议的九个角度将需约 30 分钟。