无需为每个扩展名创建臂到臂的映射。当单一映射的准确度不够时,可使用两个映射获得更好的准确度。最好先进行短扩展名的映射,然后再进行长的。这一步将帮助您创建 AUTO_MAPS.PRG 例程以达到所建议的两个映射。
定义AUTO_MAPS.PRG中测头扩展的参数集
访问AUTO_MAPS.PRG并将编辑窗口置于命令模式。
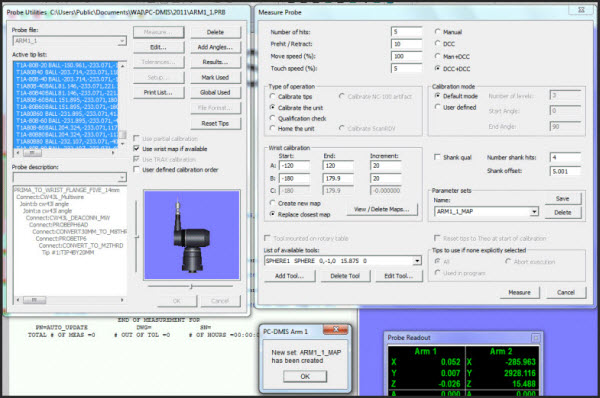
从 ARM1_1 测头开始。访问该测头的测量测头对话框(插入 | 硬件定义 | 测头 | 测量按钮)。
定义所有您在该对话框中需要的参数来创建该测头的一个新臂对臂映射。
选择测座校验区域中替换最近的映射。
在参数集区域内的名称框中键入带有“MAP”后缀的测头名称(比如,“ARM 1_1_MAP”)。
参数设置实例创建
点击保存。为ARM1_1 测头创建一个参数集。点击确定关闭信息框。
对每个测头重复第 2 至 6 步,为每个测头创建参数集。
完成后共建立了六个参数集:
ARM1_1_MAP - 针对名为ARM1_1 (臂1的短扩展名)的测头
ARM1_2_MAP - 针对名为ARM1_2 (臂1的中等扩展名)的测头
ARM1_3_MAP - 针对名为ARM1_3 (臂1的长扩展名)的测头
ARM2_1_MAP - 针对名为ARM 2_1 (臂2的短扩展名)的测头
ARM2_2_MAP - 针对名为ARM2_2 (臂2的中等扩展名)的测头
ARM2_3_MAP - 针对名为ARM2_3 (臂2的长扩展名)的测头
您只需创建每个臂上扩展名数量的参数集。比如,若每臂上仅有两个扩展名,则共有四个参数集。
这意味着,您现在可使用AUTOALIBRATE命令来调用这些参数集中的一个。当执行AUTOCALIBRATE语句时,PC-DMIS将生成一个新的臂对臂的映射,其所有设置储存在所调用的参数集中。
添加初始命令到AUTO_MAPS.PRG
进入 AUTO_MAPS.PRG.
添加臂 1 的 TEMPCOMP 命令(温度补偿)中。若在气候受控的环境中进行校准,则无需使用温度补偿命令。请参见“补偿温度”及“使用带有多臂校验的温度补偿”。
添加一个MOVE/SYNC(移动/同步)命令。
添加臂2的一个TEMPCOMP(温度补偿)命令。
在TEMPCOMP命令块后键入一个移动/同步命令。
键入 LOADPROBE/ARM1_1 命令,在臂 1 上加载带短延伸件的测头。将命令分配给臂 1。
键入一个LOADPROBE/ARM2_1命令来加载带有短臂2扩展名的测头。将命令赋值给臂2。
键入 LOADPROBE/ARM1_3 命令,在臂 1 上加载带长延伸件的测头。将命令分配给臂 1。
键入一个LOADPROBE/ARM2_3命令来加载带有短臂2长扩展名的测头。将命令赋值给臂2。
将长短测头映射的AUTOCALIBRATE命令插入到AUTO_MAPS.PRG
进入 AUTO_MAPS.PRG.
将光标放在短测头的LOADPROBE(负载测头)命令后面。
插入AUTOCALIBRATE命令(选择插入|校验|自动校验测头)。
对于此命令按F9。出现校验测头对话框。
在参数集列表中,为臂 1 上的短测头选择参数集。参数集为 ARM1_1_MAP。
单击确定。命令更新以使用所选参数设置。
将命令赋值给臂1。
重复臂2的短测头3-6。这是ARM2_1_MAP。将命令赋值给臂2。
将光标放在长测头的LOADPROBE(负载测头)命令后面。
对臂 1 上的长测头重复 3-6。参数集为 ARM1_3_MAP。将命令分配给臂 1。
重复臂2的长测头的3-6。这是ARM2_3_MAP。将命令赋值给臂2。
在例程末尾键入 MOVE/SYNC 命令。
在AUTO_MAP.PRG中插入长短测头映射间移动
在短测头的AUTOCALIBRATE(自动校验)命令后,长测头LOADPROBE(加载测头)命令前,键入一个MOVE/SYNC(移动/同步)命令。
确保测尖角度在MOVE/SYNC命令后调整到适合每个测头更改器的drop oof。您可通过插入适合机器尺寸以及臂和测头更改器设置的移动来完成。
这就完成了AUTO_MAPS.PRG所需的信息。
现在,例程结构应类似于:
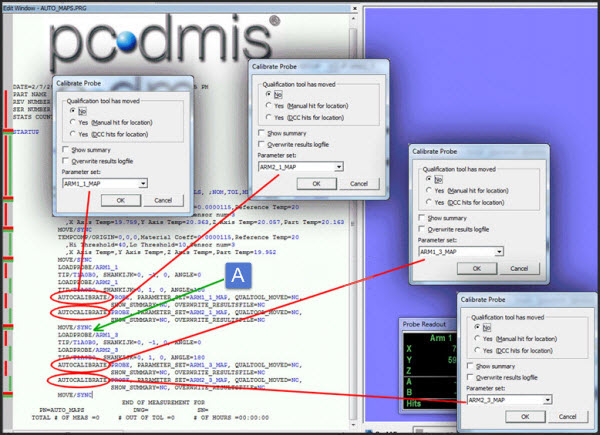
示例 AUTO_MAPS.PRG 例程。在以绿色箭头 (A) 指示的 MOVE/SYNC 后插入安全移动。
使用 AUTO_MAPS.PRG的注释
您将执行此例程在上述实例中重新创建臂对臂映射:
每当您正常维护日程要求更新您的映射。
每当您需使用全新的测头。那样的话,你需为新测头添加到LOADPROBE语句中。
每当再次安装您的测座(比如,在技术人员调整电子补偿后)。
每当数据丢失或损坏或者您不确认映射是否正确生成。
每当房间状态改变而修改温度补偿(比如,若将机器移出气候控制室)。
每当机器的物理结构变化。
运行此例程前,应删除旧映射。可使用位于测量测头对话框的测座校准区域中的视图 | 删除映射按钮执行该操作。
使用长延伸件时,未以最高速度运行,则最少需要 3-4 个小时来执行整个例程。该时间仅为估计值,具体取决于您测量机的尺寸、延伸件的长度以及所用的速度百分比。
下一步提供将命令添加到 AUTO_UPDATE.PRG 的相关信息。