ポータブルアーム装置では下記手順に従い、プローブ補正のために「プルされた取込み点」を使用して点を測定します。
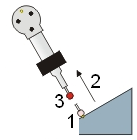
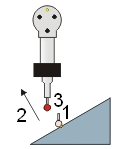
点位置 (1)での表面にプローブを置きます。「プルされる取込み点」を実行するときはプローブ軸ベクトルは重要ではありません。
いずれかの例がプルされる取込み点に対応しています
プルされる取込み点を取得するのに十分な程長いが、PC-DMISがパートスキャンを開始するほど長くはない時間、取込み点ボタンを長押しします。時間の長さを変更して「プルされる取込み点」または「スキャンを開始」を区別するには、PC-DMIS 設定エディターでDelayToStartSendingScanPointsToManualHitエントリを変更します。 「設定エディターについて - 概要」を参照してください。
ベクトル (2) の方向にチップを移動して、取込み点位置から離れます。定義されたベクトル距離 (3) 以上にチップを移動させる必要があります。プルされる取込み点を登録するために取込み点からプローブを移動しなけらばならない最小距離を定義するには、PC-DMIS設定エディタでVectorToIMMエントリを変更します。「設定エディターについて - 概要」を参照してください。
取込み点ボタンを離すと、コンピュータは異なる低音の可聴音を発生します。ソフトウェアが測定点を編集ウィンドウに挿入することに注意してください。
点が強調表示されている状態で、F9 を押して [測定された点] ダイアログボックスを開きます。ベクトルがシャフト方向ではなく PULL 方向に向いていることを確認します。
自動要素では、最後の取込み点ベクトルが補正方向を定義します。測定された要素では、最初の取込み点角度が補正方向を決定します。
対応のフィーチャー
以下のインターフェイスはプールされるヒットをサポートします:
SMXLaser (ファロトラッカー)