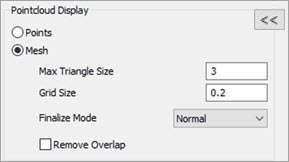
La sección Visualización de nube de puntos permite seleccionar el valor de visualización durante un escaneado. La nube de puntos puede mostrarse como puntos o en forma de visualización de malla. Si selecciona la opción Malla para el escaneado, es posible que eso le permita ver fácilmente las áreas que necesitan más cobertura de datos.
Puede hacer clic en el botón Contraer  para ocultar las secciones del cuadro de diálogo Valores de recopilación de datos de láser o hacer clic en el botón Expandir
para ocultar las secciones del cuadro de diálogo Valores de recopilación de datos de láser o hacer clic en el botón Expandir  para mostrar las secciones ocultas del cuadro de diálogo.
para mostrar las secciones ocultas del cuadro de diálogo.
La opción Malla solo está disponible en sistemas portátiles que tienen la licencia de malla.
Puntos: Esta opción visualiza la nube de puntos como un conjunto de puntos.
Malla: Esta opción muestra los datos de nube de puntos láser como malla y solo está disponible para sistemas portátiles. Con la visualización Malla es necesario utilizar Filtro de línea.
Durante el escaneado, PC-DMIS muestra la pasada de escaneado activa como nube de puntos. Cuando el software completa la pasada de escaneado, muestra el escaneado como malla. La visualización de malla es únicamente una representación gráfica temporal. Si modifica la nube de puntos (por ejemplo, si ejecuta un comando Seleccionar, Limpiar o Filtro), o bien si cierra y vuelve a abrir la rutina de medición, la visualización de malla se pierde y PC-DMIS muestra los datos como nube de puntos.
Después de un escaneado con la opción de visualización Malla, puede optar por mantener solo la nube de puntos, o puede crear un objeto de datos de malla. Si opta por crear un objeto de datos de malla, el software también mantiene la nube de puntos original.
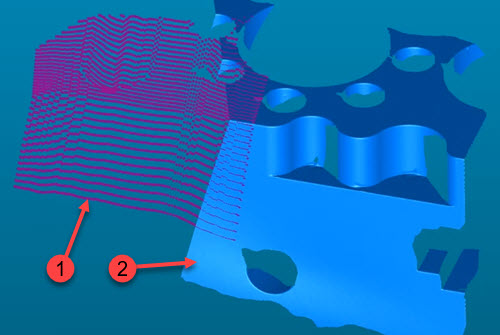
Ejemplo que muestra las pasadas de escaneado activa (1) y anterior (2)
La visualización de malla es en relación con la orientación del sensor láser. Al escanear, si la orientación del sensor láser cambia más de 25 grados en una sola pasada de escaneado, el software coloca los datos recopilados en una cuadrícula y crea automáticamente un nuevo escaneado de área.
Los valores Tamaño máximo del triángulo y Tamaño de cuadrícula definen los valores de la cuadrícula mostrada al escanear. Si modifica la nube de puntos (por ejemplo, si ejecuta un comando Seleccionar, Limpiar o Filtro), o bien si cierra y vuelve a abrir la rutina de medición, la visualización de malla se pierde y PC-DMIS muestra los datos como nube de puntos.
Si la velocidad de escaneado es baja y hay más de un punto en un cuadro de cuadrícula, PC-DMIS conserva el mejor punto.
Si la velocidad de escaneado es alta, es posible tener un cuadro de cuadrícula sin ningún dato. Esto puede ocasionar gaps en la malla mostrada.
Tamaño máximo del triángulo: El software utiliza este valor para reconocer orificios o gaps en los datos de la nube de puntos. Si la distancia entre dos puntos cualesquiera es mayor que este valor, el software no crea triángulos en esa área. Si hay elementos de orificio en la pieza, normalmente debe establecer un valor ligeramente menor que el orificio más pequeño. Con ello se evita que la visualización de malla llene el orificio (consulte la imagen siguiente).
El valor por omisión de Tamaño máximo del triángulo es 5 mm. El software lo convierte a pulgadas si la rutina de medición utiliza esa unidad. El rango de valores válidos depende del tamaño de la pieza.

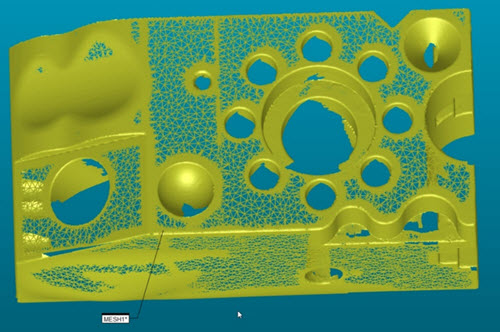
Este ejemplo muestra que la distancia entre los dos puntos es superior al valor de Tamaño máximo del triángulo. PC-DMIS no crea ningún triángulo en esta área.
Triángulos azules = Visualización de malla. El tamaño de los triángulos azules viene determinado por el valor de Tamaño de malla.
Puntos púrpuras = Puntos escaneados.
Tamaño de cuadrícula: Este valor define el tamaño de cada triángulo en la cuadrícula de visualización de malla. Este valor también influye en la resolución de visualización y el grado de precisión con que aparece la malla. Cuando se utiliza un valor bajo, se tarda más tiempo en generar la visualización de malla al escanear, pero se obtiene una mayor resolución. Tenga en cuenta que este valor es muy importante, ya que un valor bajo puede afectar negativamente a la velocidad de recopilación de datos.
Modo Finalizar: Cuando se crea la malla con el botón Crear malla de cuadrícula en la barra de herramientas Widget de escaneado portátil (o la opción Malla de cuadrícula del cuadro de diálogo Malla), el software reduce y suaviza la visualización de malla, y, además, elimina el solapamiento. La opción Modo Finalizar define la cantidad de suavizado que se debe aplicar. Las opciones son:
Preciso (menor cantidad de suavizado)
Normal
Suavizado (máxima cantidad de suavizado)
Casilla Eliminar solapamiento: Cuando se selecciona esta casilla, PC-DMIS promedia las áreas de solapamiento de varias pasadas de escaneado y, a continuación, las fusiona en tiempo real mientras tiene lugar el escaneado. Esto hace que el software elimine los datos de solapamiento de la visualización de malla. Tenga en cuenta que el objeto de nube de puntos (NDP) contiene todos los puntos escaneados originales. Quizá le convenga desactivar esta función si la representación de la malla gráfica es demasiado lenta.

(A) - Pasada de escaneado 1
(B) - Pasada de escaneado 2
(C) - Área cosida
Las pasadas de escaneado solapadas deben encontrarse a una distancia inferior a la densidad de puntos para que se puedan coser.
Ejemplo de un escaneado como visualización de malla con la opción Eliminar solapamiento seleccionada
Durante un escaneado con la opción Malla, si desmarca la casilla Coser áreas, el software superpone varias pasadas de escaneado una sobre la otra.
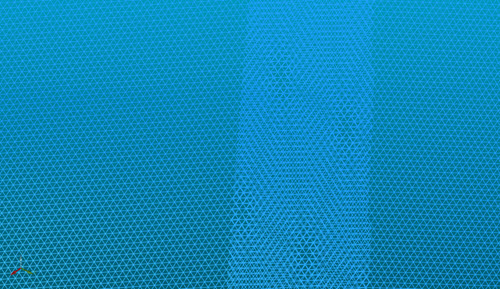
Ejemplo de un escaneado como visualización de malla con la opción Eliminar solapamiento NO seleccionada
Ángulo de calidad: Cuando se selecciona la opción Malla en el área Visualización de nube de puntos y se lleva a cabo un escaneado láser, PC-DMIS muestra triángulos escaneados con un ángulo superior al valor de Ángulo de calidad en la ventana gráfica. El software muestra en color verde los triángulos que se han escaneado y tienen una buena orientación entre sensor y superficie. Los triángulos fuera del valor de Ángulo de calidad se muestran en color rojo.
Puede volver a escanear las áreas con la línea de escaneado más perpendicular a la superficie de la pieza para obtener triángulos de más calidad.
Si selecciona la opción Eliminar solapamiento y vuelve a escanear las áreas de baja calidad con una mejor orientación entre escáner y superficie, PC-DMIS puede sustituir los triángulos rojos con los nuevos datos escaneados.
Para activar la visualización de los triángulos de baja calidad, seleccione el botón Activar/Desactivar triángulos de baja calidad  en la barra de herramientas Widget de escaneado portátil.
en la barra de herramientas Widget de escaneado portátil.

Utilice este botón para activar y desactivar la visualización de los triángulos rojos y verdes.
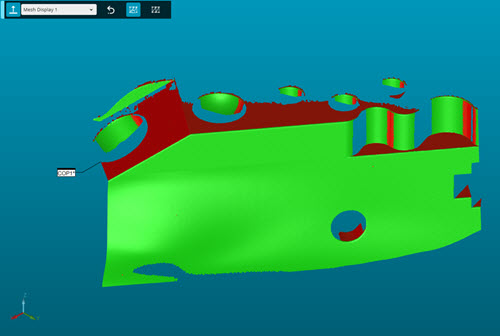
Ejemplo que muestra la visualización de los triángulos rojos y verdes cuando se selecciona el botón Activar/Desactivar triángulos de baja calidad
Para obtener información detallada sobre la barra de herramientas Widget de escaneado portáti, consulte el tema "Barra de herramientas Widget de escaneado portátil" en la documentación de PC-DMIS Portátil.
Si lleva a cabo una operación de nube de puntos, o si cierra y vuelve a abrir la rutina de medición, perderá la visualización roja y verde de los triángulos de baja calidad.
Flujo de trabajo de ejemplo: Escanear como visualización de malla
Seleccione un perfil de malla en Widget de escaneado portátil.

Puede crear también su propio perfil de malla personalizado. Para obtener información detallada, consulte "Sección Perfiles" en esta documentación.
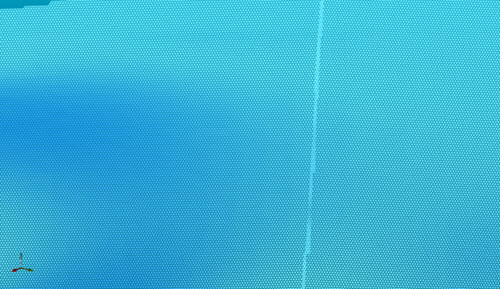
Escanee la pieza. PC-DMIS muestra la NDP como malla y los datos, en cambio, como nube de puntos.
La visualización de malla es una representación gráfica temporal. Para obtener más detalles sobre la representación gráfica de la nube de puntos, consulte "Representación gráfica de las nubes de puntos" en esta documentación.
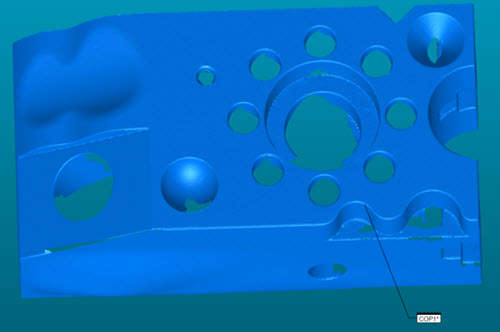
Ejemplo de la nube de puntos mostrada como malla
El siguiente paso de creación del objeto de malla es opcional. Si se detiene en el paso 2, todos los datos escaneados son una nube de puntos.
OPCIONAL: Cree la malla. PC-DMIS utiliza las opciones Tamaño máximo del triángulo, Tamaño de cuadrícula y Modo Finalizar para reducir, suavizar y, si se selecciona la casilla Eliminar solapamiento, eliminar el solapamiento. A continuación, calcula el objeto de malla final.
La rutina de medición contendrá tanto la nube de puntos (NDP) escaneada original como los objetos de datos de malla.
Más: